The TASS Mark IV Engineering Run
Thomas F. Droege
The Amateur Sky Survey, droege@tass-survey.org
Michael Richmond
Physics Department, Rochester Institute of Technology, mwrsps@rit.edu
Abstract
This paper describes the first year of operation of the TASS Mark IV
photometric survey of the northern sky. Three systems have been
operated at the Batavia, IL site. Each system consists of two
telescopes and CCD cameras taking simultaneous measurements through V
and Ic filters. While engineering parameters were being adjusted, 77
million V, Ic measurement pairs were taken covering most of the
Northern sky to -6 degrees.
Contents
When Shoemaker-Levy crashed into Jupiter in 1994, one of us (TFD)
thought it might be fun to build a "Comet Finding Machine".
Discussions were started in the then sci.astro mail list. MWR soon
joined in and The Amateur Sky Survey was born though it took a couple
of years to give it that name.
After two preliminary sets of hardware were built, a set of 10 triplet
cameras was planned and parts were ordered.
As these were the third hardware design,
we called them "TASS Mark III systems". The thinking then was
to set up triplet cameras spaced by one hour in RA and cover ten 3
degree wide lanes in the sky while operating the cameras in drift scan
mode to look for comets.
While production of these triplets started, discussion continued on
the internet. TFD soon realized that the primary problem was the
software to manage all the data that these triplets would accumulate.
Also, professional astronomers started to notice the plans and started
to persuade TFD to think of other measurements and to include filters
in the plan. The use of filters put comet discovery out of reach. To
encourage their use, Bohden Paczynski kindly purchased the filters for
the project. The plan was then changed. Instead of TFD operating ten
triplets at his Chicago suburban location, he proposed to give them
away to those interested in the project in the hope that a larger
group would be able to develop the required software. The goal
shifted from comet discovery to an all sky survey with emphasis on
variable stars.
Seven systems were distributed under this plan and the necessary
software was developed. These systems were operated over a year and a
survey was completed; see
"TASS Mark III Photometric Survey of the Celestial Equator"
(Richmond et al. 2000) either
via the ADS
or
at the TASS WWW site.
TFD then
planned a more advanced design. The Mark IV systems were designed to
have about 10 times the area throughput of the Mark III systems and
were more sensitive.
Seven Mark IV systems have been completed. Four have been shipped to
volunteers who are operating in Cincinnati, OH, Flagstaff, AZ,
Rochester, NY, and Berthoud, CO. This presentation covers only the
Engineering Run of the three systems located in Batavia, IL.
Specifications
While the drift scan mode of the Mark III cameras was effective as a
low cost design, stare mode was adopted for the Mark IV system. A
very simple mount was designed to reduce the cost of systems that were
to be given away. The design is somewhat devious. With a full motion
mount, the camera could be pointed everywhere. It was anticipated
that users would often deviate from the survey if this was possible.
The mount was thus designed to track
only +/- 20 degrees from the vertical, and was not designed to be
pointed accurately. Often there are requests to look at some "hot "
star. It mostly cannot be done, but there are often archival
measurements if it is in the northern sky.
- Optics: 100 mm diameter, 400 mm focal length. Five element
refractor. Coated in two bands.
- Mount: Dual Inverted Fork mount of our own design. Tangent arm RA
drive.
- CCD: 2k x 2k CCD442A 15 u pixels. 80,000 e- full well. Operated in
MPP mode.
- Cooling: By TEC. Cools to -40 C below chilled water temperature;
usually run at -20 C with water at 20 C.
- Pixel Scale: 7.7 arc seconds
- Read Out Time: Simultaneous readout of two channels in 46 seconds.
- Declination Motion: Horizon to the pole.
- RA Motion: +/- 20 degrees from the meridian.
This is the retirement project for one of us (TFD). Since we planned
to give systems away, it was desirable to keep the costs down to stay
within the retirement income budget. Everything was designed from
scratch. This includes the electronics which was designed from the
component level. We did buy retail computers. This would not be
recommended as a cost efficient mode for a normal project. It is
effective when the "Chief Engineer" works at no cost. Even with
these savings in direct costs a significant amount of money has been
spent. Big items are roughly $60,000.00 for lenses and $70,000.00 for
CCDs. We have (purposefully) not kept records of the total cost.
There were many adventures in the optical and mechanical design.
There was even an adventure in the electronics which was TFD's
pre-retirement field. One of the sub-systems was designed by another
and has had problems that are yet to be understood.
From the start of the project, all were involved were encouraged to
write technical notes. These now come in three classes. The
Technical Notes,
which now number 99, are of general interest and cover
hardware details, computations on specific data sets, and everything
else that does not fit in the other categories.
The
Show and Tell
entries are what they sound like: many pictures and a few words to describe
something like the construction progress to date.
An example is
Show and Tell 5, "Progress on the Mark IV to January, 1999."
Finally there are
Service Notes.
These cover fixes and changes to
the hardware and software. An example is
Service Note 7
which covers
installation of stiffener bars to improve the focus drive.
Because much of the detailed information is available in the Technical
Notes files,
we have just written a few words in the remainder of this
section to describe the Mark IV system.
You can find an overview of our design philosophy
in
Show-and-Tell 9.
- The TASS Mark IV Camera
-
The cameras for the Mark IV system were designed around the CCD442A.
At the time of the development (1997), these chips were being sold by
Loral. The CCD design had been previously owned by Farichild, Ford and
others and is now offered by Fairchild Imaging. At the time, these
were the lowest-cost chips in area per dollar by a factor of two. A
quite significant saving for a project with 14 cameras in service and
another 18 under construction. Because of the many owners, the
available data was in disarray. No two documents had the same pin
labels. It was a challenge to make these chips work.

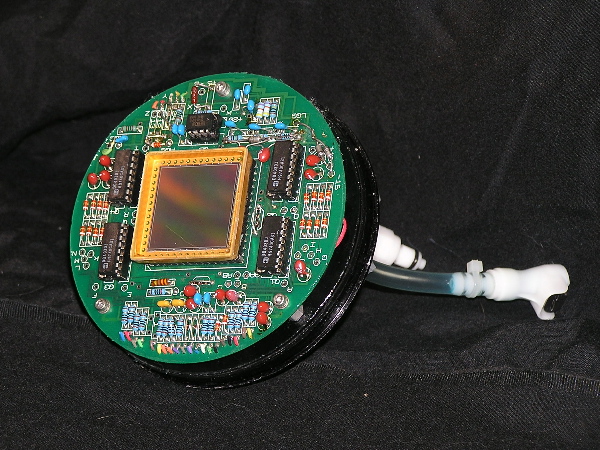
Above is the completed camera. The shutter is driven like a
parlor door. It is opened in 0.2 second by a model airplane servo
motor. The camera shown has a Cousins V filter. Since the camera is
operated with a narrow band lens that matches the filter, the filter
is never changed. The filter is thus glued permanently into the
camera shell. The camera is sealed but not high vacuum tight. Dry air
is circulated through the camera to prevent condensation.
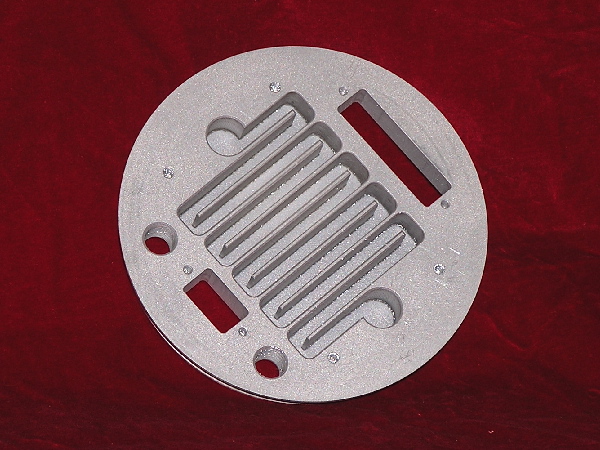
The camera is cooled by a Thermoelectric Cooler glued to a cold plate
with silver filled epoxy. The plate is very thin behind the meander
so that there is low temperature drop through the aluminum. A cover
plate is glued over the meander and contains a pair of fittings for
cooling water circulation.
The fittings are selected so that it is
difficult to make the mistake of connecting the water fitting to the
dry air circulation connector. This mistake was never actually made,
though we made most others possible. Signal and TEC power connectors
are glued into the plate. The backs of the connectors are epoxy
filled to prevent leakage through the connectors.
A spacer block above the TEC provides conduction to the back of the
CCD. Silver filled thermal grease allows CCD removal.
DAC generated DC voltages and logic level clocks are connected to the
printed circuit board where the actual clock levels are generated by
DG403 switches. A ground plane behind the socket and very short leads
from the switches provides bounce free clocks which are RC shaped.
The shell is sealed to the electronic assembly on the cooling plate by
an "O" ring.
Additional information on the camera is available in
Tech Note 40.
- The TASS Mark IV Lens
-
We searched for some time to find a lens suitable
for a wide angle survey. One of us (TFD) kept calling specialty lens
designers who quoted very expensive multi element designs. For the most
part they were not interested in the work since they realized that the
desired design was impractical.
Finally from the discussions we learned that a
flat field with low coma over a wide band width was one of the design
limitations. The difficulty of the design was some high power of the
bandwidth. Realizing that one way to run a survey was to always use the
same filter with a lens, we then started inquiring
if narrow band lenses would
be easier. This interested Elliot Burke of
High Tide Instruments who was
following the list and he undertook a design at no cost.
After a lot of
computation, a design was produced that had a
small number of elements (5)
and which had a pixel spot size of < 1 (15u) pixel (70% energy)
over the whole CCD.
This compares to more expensive camera telephoto
lenses that are typically down by 50% in the corners.
We do not recommend this exercise for the
faint of heart. While the lens design was done at no cost by one of the
tass group, the procurement was an adventure. There were problems with
lenses that were crushed by the mount in cold weather, lenses installed
backwards, and numerous errors in spacing.
We ordered 40
lenses split into 16 V, 16 Ic, 4 B, and 4 R band designs. Elliot Burke
found a clever design which used the same 5 lenses for each band but with
different spacings to reduce the cost. The lenses were coated in two
bandpasses, one for the B and V lenses and another for the R and Ic.
As noted above, there were many
disasters. Each time one occurred someone from
the TASS mail list stepped
forward and helped solve the problem.
From
a message sent to the TASS E-mail list on 3 January 1998:
"Note that this is high risk, and a lot of money for me. We
want to get it right. I know this is hard. Now is the time to speak up if you
know anything."
Yep!

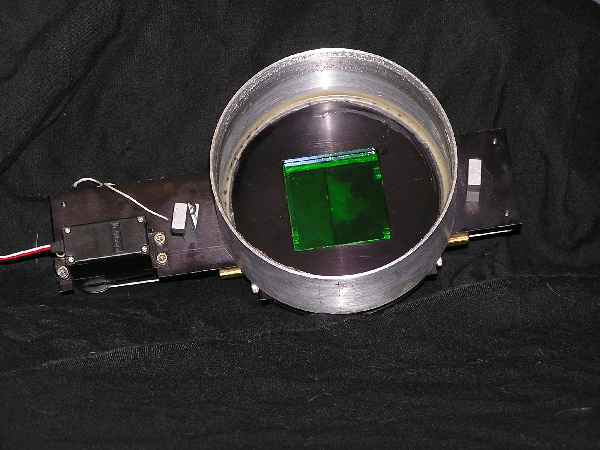
A lens shown with several cameras for comparison.
An I lens is shown.
The lenses vary in length for the various bandwidths.
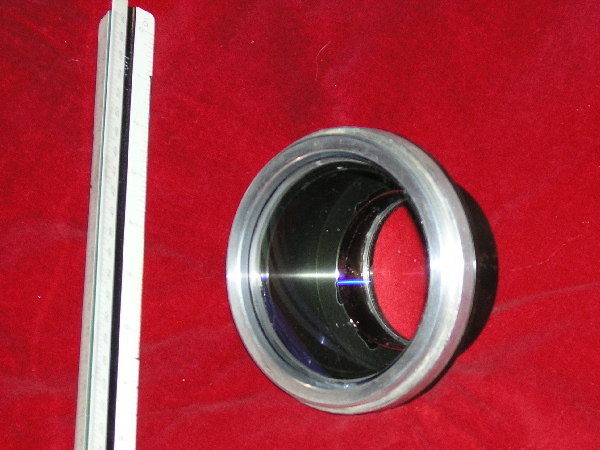
The rear
cell for an I lens. The draftsman's ruler is for comparison. Note
the non anodized ring on the lens cell. This was required to "fix" a
spacing design error. The vendor glued the lenses in this cell and when
stored in a garage over a Chicago, IL winter many of the lenses were
crushed. We had to heat the whole assembly in an oven and push out the
lenses. The cells then had to be machined to a larger radius and the
lenses were mounted with RTV.
- Electronics
-
The electronics are described in
Tech Note 38
- Mount
-
Some current pictures are shown in the Operation section below.
The
following technical notes give more detail:
- Watchdog Hardware
-
We sleep most of the time the system is operating. Since weather is
not all that predictable, we have a rain detector that closes the
dome. To limit the number of bad frames that the software must
eliminate, we have developed a "Clear Sky Detector" that is quite
effective. This is described in
Tech Note 93.
When the detector does not see clear sky, dark frames are taken.
The Mark IV cameras produce simultanenous pairs of images in V and I
passbands.
We now describe the steps by which the
Mark IV reduction pipeline turns these images
into lists of stars.
The basic series of operations is
- create master dark and flatfield images
- subtract the master dark from each image
- divide each image by the master flat
- measure and remove the sky background
- find stars
- measure instrumental properties of each star
- calibrate the position of each star
- calibrate the magnitude of each star
Most of these steps involve pieces of the
XVista suite of astronomical software,
which grew out of the
PC-Vista
package.
Our entire source code is available for anyone to use;
see
A pipeline for reducing TASS Mark IV data.
- Creating master dark and flatfield images
-
We take a series of more than 10 frames with the shutter closed
and lens covered to serve as "dark frames."
The temperature of the camera during these dark frames is
controlled to be at the same temperature as the target frames,
and the exposure times are identical to those of the target frames.
The pipeline creates a "master dark" frame
on a pixel-by-pixel basis in the following way:
the values for a given pixel are taken from each dark image,
yielding a set of
values which are then sorted.
The mean of all values in the second and third quartiles
(i.e. the mean of all values between the 25'th and 75'th
percentiles) is determined,
and this interquartile mean is placed into
the output "master dark" at that pixel location.
To create a "master flatfield" frame,
we can use either the target images themselves
or a set of special images of a diffuse light source;
we typically use approximately 30 target frames from a good
night.
Before the frames are combined, the dark current is
removed from each one.
Because the temperature of the camera may have changed
slightly during the hours separating the dark frames
from the target frames,
we examine a set of prescan columns at the edge of
the frames to look for an offset between the master
dark image and each raw flatfield image;
we add a constant to all pixels in the raw flatfield
frame to remove any offset.
We then subtract the master dark from each raw flatfield
frame to remove the dark current.
The dark-subtracted flatfield frames are then
subjected to the same pixel-by-pixel interquartile mean
to generate a "master flatfield" frame.
We trim the edges from this master flatfield
so that only pixels struck fully by light remain.
During the early stages of our work, we found a number
of bad spots in the images from each camera. Some are
always present, caused by defects in the CCD chip;
others occur rarely, when moisture leaks into the air
near the chip and freezes into ice crystals on the silicon.
These bad spots are easily seen on the master flatfield
images, so we devised a scheme to identify them.
We search for regions of connected pixels in the master flatfield
frame which all lie far from the local mean value.
We store a list of all such bad regions as the "mask"
corresponding to each camera.
We will later set a flag in all measurements
made in any "masked" region.
Experience has shown us that the flatfield frames are nearly
identical from one night to the next, so we use a single
"master" flatfield frame for each camera over a period
of a month or two.
- Subtracting the master dark frame from each target image
-
The first step in the reduction of each raw target frame
is to remove the dark current.
We compare a set of prescan columns at the edge of each
image to the same prescan columns in the master dark frame,
and shift all pixels in the target frame by a constant value
to remove any difference.
We then subtract the value of the master dark frame
from the target frame on a pixel-by-pixel basis.
We note a small, systematic error which occurs at this
point due to the limitations of our software.
The XVista package works on 16-bit integer FITS files only.
Although the raw images have a dynamic range which spans
16 bits, this subtraction truncates the data so that
it lies within 15 bits (pixel values ranging from 0 to +32,767).
In theory, this could cause very bright stars to appear
artificially faint, since pixel values of, say, 50,000 counts
above the dark current would be set to 32,767 counts.
We believe that this issue is not particularly significant
in practice for two reasons: first, the full-well capacity
of the CCDs is 80,000 electrons, and we run the devices
at a gain of 2.5 electrons per data number. Thus,
any pixel value above 32,767 is very near full-well
and probably non-linear anyway. Second,
we mark any such pixel values as
suspect, and mark their magnitudes in our output as well,
so we can remove them from later analysis.
- Dividing each image by the master flat
-
We divide the dark-subtracted images
pixel-by-pixel, by a normalized version of the
corresponding master flatfield image.
The resulting clean images are trimmed to remove
prescan and overscan columns,
and the very top and bottom rows
which are not fully illuminated.
- Measuring and removing the sky background
-
We measure the "sky" value for each image
by forming a histogram of all pixel values,
finding the peak of the histogram,
and fitting a gaussian to the region near the peak.
This procedure gives us a notion of both the
mean background value and its standard deviation.
We have found that both measures can be used to
distinguish good nights from cloudy ones.
The user can set limits on both quantities
for each camera,
so that any image failing to fall within the limits
is automatically marked as "bad."
There are times when our "clean" images
show clear spatial variations,
sometimes due to passing clouds,
sometimes due to transient lights from neighboring houses.
Since our method of finding stars assumes
a uniform background value across the entire frame,
we try to remove large-scale variations at this point.
We divide the frame into a rectangular grid of sub-frames
and estimate the background value of each sub-frame
by fitting a gaussian to the histogram of its pixel values.
We then fit a first-order polynomial
to this grid in each direction,
defining a model for the background which varies smoothly
across the entire image.
We subtract this model from the image,
then re-calculate the mean and standard deviation
of the "sky" as described above.
- Finding stars
-
We search for stars in each cleaned image
by defining a large set of candidates and then
passing them through a set of tests.
The first step involves a simple threshold
based on the sky values:
any pixel which exceeds the mean sky value
by more than a given number
(typically 3 )
of standard deviations
marks a candidate.
The properties of nearby pixels --
full-width at half-maximum (FWHM), roundness and sharpness
(see Stetson 1987) --
are calculated and subject to a series
of tests.
Any candidate which passes all the tests is designated a star.
We keep track of the number of stars found in each image.
If the number is either too big or too small,
we mark the image as "bad."
A good image typically contains several thousand objects
which pass all our tests.
- Measuring instrumental properties of each star
-
We calculate the (row, col) position of each star by fitting
1-D gaussians to the intensity-weighted marginal sums of
pixel values in each direction.
We calculate the instrumental magnitude of each star
using aperture photometry,
with the same circular aperture for all stars on a frame.
We add up the light from all pixels
within a circular aperture of
radius typically 30 arcseconds (i.e. 4 pixels);
for pixels which lie partially within the circle,
we take a fraction of the intensity equal
to the fraction of the area within the aperture.
We then find a local sky value for each star
by determining the median of all pixels values within
an annulus around the star with typical radii
77 to 154 arcseconds (i.e. 10 to 20 pixels).
We subtract the local sky's contribution to the
light within each aperture, and convert
the result to an instrumental magnitude.
We also estimate the uncertainty of this magnitude
based upon the photon statistics of both the
sky's light and star's light.
The list of instrumental positions and magnitudes
for objects found within each frame
also contains a set of flags.
We set one flag for any star which contains sky-subtracted pixel values
above a particular threshold,
which mark it as "possibly saturated."
We set different flags for stars which fall near
the edges of the frame,
or close to one of the regions marked as "bad" in the image mask.
- Calibrating the positions of stars
-
In order to convert our (row, col) positions of each
star into (RA, Dec),
we use a set of stars from the Tycho-2 catalog (reference)
as a reference.
There are
typically 40-60
bright Tycho stars per image.
Our match software
- projects all measured (row, col) positions around
the center of each image onto a tangent plane,
- projects the (RA, Dec) positions of all Tycho
stars around the estimated position of each image
onto a second tangent plane
- searches for matches between the two sets of points
- defines a cubic transformation
between the two sets of points
- applies the transformation to the projected positions
of all stars
- de-projects the transformed positions into (RA, Dec)
If the routine cannot find a match between the two sets
of points (due to clouds or a pointing error),
it discards the frame from all further processing.
When we compare the resulting positions to those in the
Tycho-2 catalog,
we find a standard deviation of roughly 0.6 arcsecond
for bright stars (V < 10)
and roughly 1.2 arcseconds for faint stars (V > 10).
- Calibrating the magnitudes of stars
-
In order to convert our instrumental magnitudes to
some standard scale,
we again use Tycho-2 as a reference catalog.
However, we first create a "photometric subset"
by selecting only stars with
the following properties:
- 1 < Bt < 11.8
- 1 < Vt < 10.7
- -0.2 < (Bt - Vt) < 1.8
- sigma(Bt) < 0.05
- sigma(Vt) < 0.05
- no other Tycho-2 star within 50 arcsec
- no indication of binarity in Tycho-2 entry
We then apply a set of linear transformations to the Tycho-2 photometry
(Henden, reference private communication)
to convert Bt and Vt to Johnson-Cousins V and I.
We then compare these approximated V and I magnitudes
to the instrumental measurements of stars in our images.
We begin by collecting matching instrumental measurements of stars
from the simultaneous V and I images;
stars which are detected only in a single passband are discarded.
We create a photometric solution for each night in the V passband
like so:
calibrated V = v + a + b * (v - i) - k * airmass
j
where v and i represent raw measurements,
V the calibrated magnitude, a_j the zero point
for frame j during the night,
and k an estimate of the first-order extinction
coefficient.
In other words, we allow the zero-point to change from
one image to the next (due to clouds), but force
a single color term b for the entire night.
The extinction coefficient k acts only
differentially within each frame;
since our images span almost six degrees diagonally,
the differential extinction can become significant, especially in V-band.
We are unable to solve for extinction, but even a rough
guess will reduce the differential effect substantially.
We create a similar photometric equation to transform
the instrumental I-band measurements to the Tycho system.
We solve each equation via linear least-squares
techniques.
The resulting output values for the zero-point
coeffients and color term give us another indication
of the quality of a night,
which we can use to disqualify all or part of its measurements
from further consideration.
The output of the pipeline
is a set of star lists,
one per simultaneous pair of images,
containing the (RA, Dec) position and (V, I) magnitudes of each
star in the image.
A good night yields several thousand stars
per image and several hundred images;
the best nights have produced almost two million
pairs of magnitudes.

The dome containing TOM2 and TOM3 is on the shed roof in the upper
left corner of this picture. TOM1 is in the tower at the center to
the left of the chimney. A third floor level deck connected by a
spiral staircase allows access to the various cameras.
We are able to take data about 100 nights a year here in suburban
Chicago. During the day we scan the weather reports to see if the
night will be possibly clear enough to take some data. Near dusk we
open up the dome and the tower. The chilled water pumps and dry air
pumps are started and the cameras set to cool down mode. It takes
about an hour for the temperature to stabilize. Since we control the
temperature of the cameras to less than 1 C, we find that the
difference in darks from night to night is much less than the sky
noise. After trying various light boxes, screen flats, fog flats, and
the like, median sky flats are used. These are made from clear sky
data runs. This means that darks and flats are not a part of the
normal run procedure. We plan to do them several times a month for
the coming run.

A better view of the 7-foot diameter clam
shell dome that houses two dual systems.

A closeup of the dome. One can see one of the telescope pairs
pointing to the upper left. (South)
Shortly before it is fully dark, the night's image run is started.
The three systems are set to scan images in Declination. TOM1 scans
from -4 to +16 degrees in 6 steps of 4 degrees. TOM2 scans +20 to +48
in 8 steps of 4 degrees and TOM3 scans from +52 to +88 in 10 steps of
4 degrees. With 90 second exposures and 46 seconds read out and
adding motion time we get about 20 V and Ic exposures from each camera
pair each hour of operation. This is a raw data rate of 1 GByte an
hour. The rate is just sufficient to cover all the sky that transits
the meridian during the operating night.
Once it gets dark enough to get images we examine a few over the
ethernet connection from our office. Then with an eye to the weather,
we go to bed.
At dawn, the dome is closed and TOM1 is pushed into it's enclosure.
The data analysis pipeline is then started which copies all the data
from the three camera control computers into the 6 processing
computers. This is done over a standard eathernet connection which
links the 3 data collection computers running Windows to the 6 data
processing computers running Linux.
The operator then goes back to bed. Sometimes a few images are
examined if somehow the operator really wakes up.

TOM1 in its tower with the doors open.
At an hour reserved for retired folk, the operator gets out of bed and
does some checks on the data quality. Five to 10% of the images are
examined and some assessment is made as to whether the data is worth
keeping. This examination continues at intervals through the day. It
takes 12 to 14 hours for the slowest (1.5 GHz Pentium) to complete the
processing so it is near time to start running
again by the time processing is complete. Since the data is copied to
the processing computers, the processing step can take up to 24 hours
before it would fall behind. Computers being what they are, the
pipeline sometimes does not run or a computer has died or ...
After the processing is complete, the images that passed the cuts are
written to CD. This is usually done late in the evening, sometimes
after the next run has started. The result of the processing is
written to a monthly file and a backup file on a different computer.
The processing result is a list of stars with their magnitudes and
positions as well as control data which records the conditions of the
run, software version, etc...
At the end of each month, the
accumulated measurements are written to four sets of CDs. One set is
mailed to the on line data base at
http://sallman.tass-survey.org/servlet/markiv/
A second set is mailed
to the web site at
http://www.tass-survey.org/tass/tass.shtml
as backup, and a master set and a backup set are kept at the data
collection site in Batavia, IL.

TOM1 with the coo-coo clock mount pulled out ready for operation.
This data is considered to be "Engineering Run" data. We hope that you will not look at the curves shown here and say "the tass data is xx good" and never
look at it again because it does not meet your current accuracy requirements. We are making changes to improve the data quality. We have spent a year during which we were constantly changing the hardware, the operating procedure, and the software. This has had its effect on the consistency of the data. The present data is good enough to discover a lot of new variable stars. It is not good enough to find some others
We have collected over 77 Million V, Ic
measurement pairs of 8.2 Million stars in the northern hemisphere to -6
degrees. We have measured 2.6 Million stars at least ten times.
Many stars have been measured several hundred times.
Coverage for at least one measurement in V and Ic.
Declination from -6 to +90, RA 0 to 360 degrees.
Above is the coverage for at least one
measurement pair. We only keep data for which there is a simultaneous
detection in the V and the Ic filters. This causes complete loss of the
data point when one of the filters drops below the detection limit of around
magnitude 15.. When, as in very red stars, there is a large difference
this sometimes causes loss of data when a star is quite bright in the other
filter.
Coverage for at least ten measurements in V and Ic.
Declination from -6 to +90, RA 0 to 360 degrees.
Next is the
coverage for at least ten measurements. Some structure can be noted which
is due to the overlap of the measurement frames. There are problems due
to the overlap of the fields.
Plot of stars in a small portion
of the survey area which
a) were measured more than 40 times in V, and
b) have standard deviation from the mean greater than 0.1 mag.
Overlap effects can be seen
in Declination, and to a lesser extent in RA, due to the
non-random pattern of pointings.
The overlap problems are further
illustrated in the plot above where we show stars that are measured more
than 40 times in V and where the sigma of the measurements of the individual
stars is > 0.1.
It is obvious that the error is greater in the field
overlap area. For some of the camera pairs, we have detected and
corrected a N-S tilt that could cause this. Of greater suspicion is the
quality of the sky in suburban Chicago.
Small area data plot for stars measured 40 times or more where the sigma of
each star's measurements is < 0.1.
Next we show
a subset of the 40 sample or more V data where we selected stars where the
sigma of the measurements of the star was < 0.1. The scatter is
clearly lower in the areas where the frames do not overlap. More detailed
studies of the errors in the data can be found in the technical notes.
For example,
Tech Note 97
and
Tech Note 98.
To show an overall
view of the scatter of the data, we plot the sigma for stars measured 3 times
or more averaged in 0.1 magnitude bins. This is shown first as a
log plot.
A log plot showing scatter in the measurements of stars measured 3 or more
times in V in 0.1 magnitude bins.
On a log plot we expect a linear rise in scatter due to the
statistics of the measurement. This can be seen to start roughly at
magnitude 11. Below magnitude 11, something else limits the scatter to
around magnitude 0.05. We know this is due to variation of the
position in the frame since in selective tracking experiments the noise
floor is below 0.01 sigma.
For example, figure 5 and 6 of
Tech Note 88.
Since we have not
excluded variables stars from this data, a small part of the scatter is due to
measurement changes that are real.
This same data is next plotted
in a more conventional linear plot.
A linear plot showing scatter in the measurements of stars measured 3 or more
times in V in 0.1 magnitude bins.
We continue to study the data. We have been converting all
the systems to be identical and will shortly start taking additional data to
compare to the data presented here. We have some hope to isolate the
limitations on the scatter.
We observe however, that this data
will be mostly useful from about magnitude 11 to 13. The brighter stars
are well measured. In the useful range the scatter appears to be limited
by statistics.
There is a lot of day to day work running this survey. For amusement
in off hours, we have hunted the data for variable stars. There is a
lot of work yet to be done on programs to do this. The result of an
early effort contains 1713 variable star candidates in a format that
can be submitted to VizieR. Depending on our skill in writing the
search program often less that half turn out to be known variable
stars. The rest are mostly obvious variables. Our emphasis has been
to develop the catalog of information. We put our "finds" on
the mail list
or on
the Wiki
and encourage others to study these stars.
Several have taken our preliminary data, observed the star, taken
enough data to confirm the variability type, and published the data
(e.g., Koppleman and Terrell 2002; Koppelman and West 2002;
Wils and Greaves 2003; Wils 2003).
This is very encouraging for us. By acting as only a source of
information and not claiming all the credit, we have encouraged a
number of enthusiasts to follow the tass work and to add greatly to
the overall effort.
To give some idea as to the nature of this data, we have selected 10
stars from the candidate list and show them below. For selection, we
simply paged through the list stopping at random and marked a star.
The selected stars were run through VizieR using just the General
Catalog of Variable Stars. These stars may be on other lists.
First, for comparison, we show a couple of stars picked for having
more than 50 measurements and which were not on the variable list.
The magnitude scale is set to be similar to the later events for
comparison.
Below: RA 05:30:51.5 Dec -00:08:09
Below: RA 07:32:32.7 Dec -01:00:58
Next we show the ten stars selected from the potential variable list.
The data points are connected to aid one of us (TFD) who has a minor
visual impairment. The vertical axis is magnitude with the Ic filter
plotted in red and the V filter plotted in green. The horizontal axis
is Julian Day minus 2,450,000. The label is the star's position as
TASShhmmss+ddmmss.
Below: RA 00:30:08.5 Dec +37:53:34.
A probable long period variable.
Below: RA 01:09:44.5 Dec -02:02:31.
A probable short period variable.
Below: RA 01:37:41.5 Dec +07:03:19.
A probable short period variable.
Below: RA 06:12:26.9 Dec +12:12:36. This is EI Ori, a carbon star.
Below: RA 07:03:54.0 Dec +11:01:42.
A probable short period variable.
Below: RA 07:17:10.2 Dec -01:44:17. This is V0634 Mon,
an eclipsing variable with period 2.11 days.
Below: RA 08:06:21.6 Dec +03:23:02.
No obvious classification. More data is needed!
Below: RA 13:51:50.8 Dec -02:12:30.
A probable short-period variable.
Below: RA 15:00:53.4 Dec -01:23:54.
A probable long-period variable.
Below: RA 20:13:46.1 Dec +02:59:31.
This is V0517 Aql, a Mira variable.
The current plan is to operate TOM1, TOM2, and TOM3 in Batavia, IL for
the next few years taking repeated scans of the Northern sky to -6
degrees. The data will be processed and put into the on line data
base. We hope to be able to continue this for several years, until
we get all that is possible for the longer period variables.
A design is in process for a Mark V. This has been designed as a 4
camera mount with the capability of tracking longer than the Mark IV
s. We would use this design to take long runs tracking the sky in
four filters to obtain data on short period variables.
We wish to thank the entire TASS crew. There has been an average of
180 followers on our mail list over the years. When a crisis arises,
someone always steps forward with knowledge and skill to solve the
problem. We also thank Bohden Paczynski who supplied some of the CCDs
early in this project and who has given constant support
- Greaves, J., and Wils, P., 2003,
Confirmation of Variability of FASTT Suspected Variables
IBVS 5458, 1
- Koppelman, M. and West, D., 2002,
NSV 10892 is a W UMa Eclipsing Binary ,
IBVS 5327, 1
- Koppelman, M. and Terrell, D., 2002,
GSC 00279-00321: A New W UMa Eclipsing Binary
IBVS 5299, 1
- Richmond, M. W. et al., 2000
TASS Mark III Photometric Survey of the Celestial Equator
PASP, 112, 397
- Stetson, P. B., 1987,
DAOPHOT - A computer program for crowded-field stellar photometry
PASP 99, 191
- Treffers, R. R. and Richmond, M. W., 1989
PCVISTA: A Library of Astronomical Image-Processing Programs for
the IBM PC,
PASP, 101, 725
- Wils, P., 2003,
Confirmation of Variability of Bidelman-MacConnell Suspected Variables
IBVS 5457, 1
Readers can find most of the web-based information discussed above
by starting at
Last modified by MWR 3/25/2004
Enter
the forum and ask your questions to the author!
Back
to the Meeting index